第3回
ねじの締付け
管理方法について
代表的なねじ締結の管理方法であるトルク法締付け、回転角法締付け、トルクこう配法締付けについて説明します。
JIS (日本工業規格)は、代表的なねじ締結の管理方法として、次の3種類を取上げています。
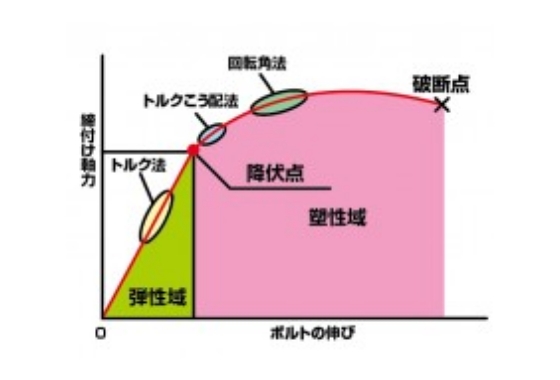
(1) トルク法:弾性域での締付け力と締付けトルクとの線形関係を利用
(2) 回転角法:ボルト頭部とナットとの相対締付け回転角度による
(3) トルクこう配法:締付け時の回転角-トルク曲線のこう配を検出し、降伏締付け力を目標とする
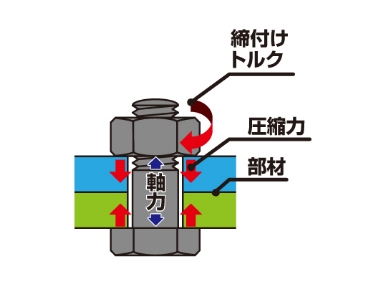
締付け領域は、前回説明した「弾性域」なのか「塑性域」なのかを示し、「弾性限界」とは、弾性域から塑性域に変換する点のことです。
締付け係数Q とは、軸力の最大値を最小値で割った値で、ばらつきの大きさを表わす値です。 Qの値が大きいほどばらつきが大きいことを表しています。トルク法と弾性域での回転角法は、ばらつきの大きいことが分かります。
トルク法
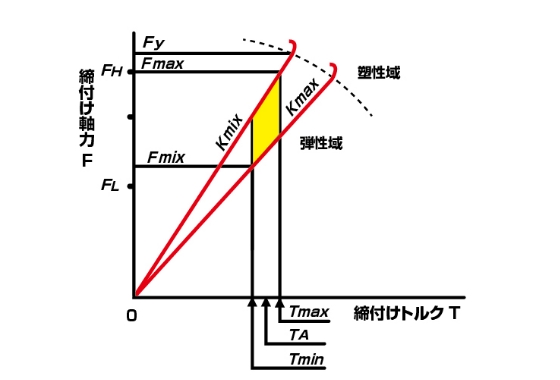
トルク法とは、弾性域での軸力と締付けトルクとの線形関係を利用した管理方法で、ボルト締結で最も一般的な締付け方法です。
作業時にトルク値だけを管理すればよいので、特殊な工具を必要とせず、作業性に優れた簡便な方法です。
トルク法は、弾性域内であれば自由に軸力の大きさを変えられますが、弾性域を超えた締付け管理ができないため、弾性限界を超えないように、ばらつきを考慮して降伏点(耐力)の60%~70%程度で締付けるのが一般的です。
締付けトルクは、ねじや座面の摩擦によって軸力がばらつくため厳密な締付けを必要とするときは、摩擦特性管理に注意が必要です。
回転角法
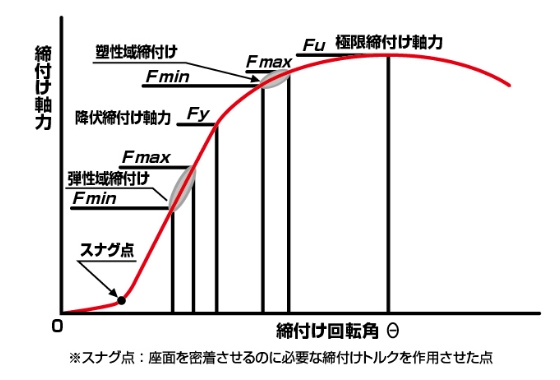
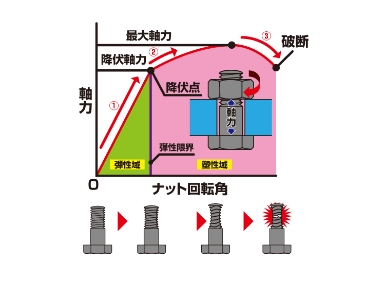
回転角法は、ボルトの頭部とナットの相対的な締付け回転角度を指標として、着座してからのねじを回す角度で軸力を管理する方法です。
回転角法には弾性域締付けと塑性域締付けがありますが、弾性域回転角法は、軸力のばらつきが大きいので、塑性域回転角法が一般的です。
塑性域回転角法によって締付けられたボルトには高い軸力が与えられ、永久伸びが生じるため、ボルトの再使用は一般に認められていません。
トルクこう配法
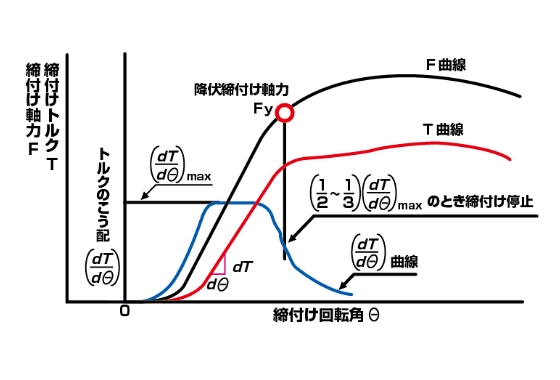
トルクこう配法とは、締付け角度に対するトルクの上昇率(こう配)の変化から、ボルトの降伏点(耐力)近傍で締付け力を管理する方法です。
締付けトルクと回転角を電気的なセンサなどで検出して、弾性域から塑性域への変化点(降伏点・耐力)をコンピュータで算出し、弾性限界で締付けを制御します。ばらつきの要因はボルトの降伏点のみのため、トルク法より軸力のばらつきが小さく、回転角法ほど塑性化しない領域での締付け方法です。自動車のエンジンやシリンダヘッドのボルトなど、締付けの信頼性の高さを求められる場合に用いられることが多い管理方法です。